




智能无人系统(Intelligent unmanned system)是人工智能与无人系统相结合的产物,在近十年得到了迅猛的发展。而无人系统作为人工智能终端将起到越来越广泛的应用,其中无人机(UAV,Unmanned Aerial Vehicles)是一种典型的自主式无人系统,在军事领域和民用领域都起着非常重要的作用。
目前,无人机广泛用于航拍、植保、环境监测、地图测绘,以及监视和侦察、地面打击和电子对抗等。然而,目前的无人机技术大多停留在平稳飞行阶段,只能在有限的滚转和俯仰姿态下飞行,不能发挥无人机的机动性能。随着应用范围的拓展和军事领域的竞争,机动飞行已经成为未来无人机技术发展的关键点。下面分别从民用需求和军用需求角度对无人机机动飞行技术展开说明。
1.1.1 无人机机动飞行的民用需求
特技飞行表演中通常会穿插各种机动动作,是机动飞行的典型应用之一。特技飞行表演是飞机与舞蹈艺术的集合,堪称“蓝天上的芭蕾”,是惊险而美丽的空中特技表演艺术同时也是一个国家空军实力的标志

(a)中国空军八一特技表演队


(c)英皇家特技飞行队训练场景

(d)法国航展:法国精英特技飞行团
而飞行表演队是展示飞行技术和飞机性能,进行飞行表演的航空兵分队,多个国家投入了大量的时间和精力建设飞行表演队。至21世纪初,世界共有60余支飞行表演队,比较著名的有:美国空军的雷鸟和海军的蓝天使、英国皇家空军红箭、法国空军的法兰西巡逻兵、俄罗斯的勇士和雨燕、意大利的三色箭、加拿大的雪鸟、日本航空自卫队的蓝色冲击波和中国的八一飞行表演队等[2]。如图1-1所示,展示了各国飞行表演队的精彩演出。
但飞行表演具有一定的危险性,飞行员训练也要投入大量的时间精力。无人机特技飞行表演作为飞行表演的另一种潜在形式,将会带来更加精彩的表演,同时在安全性和经济上也占有一定的优势。
另一方面,在一些特殊的任务中,无人机需要在城市建筑物、树林等复杂的境中飞行,机动飞行使无人机能够在复杂的环境中快速改变自身的姿态和位置,可以极大地提高无人机的生存能力。因此,在民用领域,无人机的机动飞行技术的发展将带动无人机的应用,起到越来越重要的作用。
1.1.2 无人机机动飞行的军事需求
伴随着军事装备的发展,无人战斗机的发展、退役战斗机无人化改造、有人/无人联合作战、集群技术等新的无人机运作方式的出现,这些都对无人机的机动飞行提出了很高的要求。
(1)无人战斗机的研制
20世纪90年代,美国抢先将无人战斗机(UCAV,Unmanned Combat Aerial Vehicles)列入军事装备发展计划,引起各国军事界极大关注,兴起了世界范围的研制UCAV热潮,图1-2展示了各国研制的先进无人战斗机。
X47-B是美国诺斯罗普·格鲁曼公司为美国海军研制的舰载无人作战飞机验证机,主要用于执行对地纵深打击、压制防空系统等作战任务。X-47B于2011年首飞,并在2013年在世界上首次成功完成了航母自主弹射起飞和拦阻着舰全流程飞行试验[3]。神经元无人驾驶战斗机是由法国领导,五个欧洲国家参与研制的。2012年12月,神经元无人机在法国南部伊斯特里斯飞行试验中心首飞成功。利剑无人机是由中航工业601所研发的飞翼布局隐身无人作战飞机。项目于2009年启动,2012年12月13日下线,随后进行了密集的地面测试。2013年11月21日,利剑无人机在西南某基地完成首飞。

(a)X-47B无人战斗机

(b)神经元无人机

(c)利剑无人机

(d)暗箭无人机
(2)退役战斗机的智能无人化改造
对于有人机,大机动动作的完成以飞机自身的机动特性为基础,同时取决于驾驶员的驾驶技术和经验。随着无人机(UAV)技术的发展,无人战斗机将在未来战场中更多地替代有人机执行战斗任务。由于无需考虑驾驶人员的身体极限,无人战斗机可以执行比有人战斗机更剧烈的机动动作。退役的战斗机正好可以解决这个需求而,因此可以考虑将退役战斗机进行无人化改造,图1-3展示了部分退役战斗机无人化改造的实现。
波音公司将退役的F-16喷气式战斗机改装成无人驾驶飞机[4],并成功进行了多次飞行试验;波音技术部门联合美国空军上周在佛罗里达Tyndall空军基地成功测试了搭载无人驾驶系统的退役F-16战机,并将这种新机型命名为QF-16。据介绍,这套无人驾驶系统可以完美的发挥出战机的实力,并完成诸如超音速飞行以及9个G的空中急转大载荷飞行动作等。能够在训练中成为飞行员最有力的对手。
中国空军曾装备大量歼6作战飞机,在原有设备上取消机炮、瞄准系统、弹射座椅、氧气系统等设备,加装自动飞行控制系统、自动驾驶仪、地形匹配导航系统以及大威力的机载战斗部,可以将退役歼6在智能无人化后改装成无人攻击机。退役歼6改装的无人攻击机,可以攻击敌人的地面固定目标,如机场、军港、指挥中心、导弹发射阵地等,大批改装的歼6在战时能对敌人空防造成很大压力。

(a)波音公司改造的QF-16无人机

(b)歼6战斗机无人化改造
图1-3 战斗机无人化改造
退役战斗机的智能无人化改造不但可以解决退役歼击机的处理问题,而且二次利用,改装成智能化无人化的更加机动灵活的无人战斗机,可以创造巨大的军事效益。
(3)无人机与有人驾驶战斗机编队飞行执行任务。
无人机要想和有人驾驶战斗组成编队飞行需具有与有人驾驶飞机相接近的机动飞行能力,以使得无人机不被掉队而破坏编队队形。具有机动飞行控制能力的自动驾驶仪使得无人机能够更好地发挥其自身的强机动性飞行能力,大大提高了其使用价值,图1-4展示了部分有人/无人协同飞行测试。
2014年3月20日,“神经元”无人机与“阵风”战斗机和猎鹰公务机在沿法国南部海岸编队飞行数百公里,该公司表示,这是“神经元”无人机第一次与有人机实现编队飞行,编队飞行近两个小时。2016年8月17日,X-47B无人空战系统演示验证机在“西奥多·罗斯福”号航母上进行飞行操作,期间,X-47B完成了一系列试验,并首次验证了与F/A-18“大黄蜂”有人机安全、无缝的协同操作能力。试验期间,两架“大黄蜂”战机和一架X-47B无人机在弗吉尼亚海岸附近,以相同的模式进行起飞与降落,X-47B对6个项目进行了飞行试验,包括起飞、顺风飞行、转向航母背面、着舰、折叠机翼等,不仅试验了无人机安全起降的能力,而且还探索了确保有人机紧随无人机之后执行相同操作的方法[5]。


(4)机动飞行在战术上的其他应用
机动飞行在战场具备很多应用。使得无人机可以在复杂环境中跟踪、打击快速移动目标,如通过机动飞行快速地改变无人机的航向或速度,从而锁定跟踪目标并实施精确打击,或者通过预先设定的机动动作快速改变飞行航迹躲避攻击,这些都极大地提升无人机的作战生存概率。
综上所述,无人机的机动飞行无论是在民用领域还是军用领域都有着重要的应用,有着广阔的发展前景,因此无人机的机动飞行具有很强的研究价值和应用需求。
1.2 无人机自主机动飞行研究现状
随着飞行器任务要求的提高和飞行器自身设计的复杂,对整个控制系统提出了更高的要求。近些年,无人系统的软硬件研究得到了快速发展,飞行控制的发展经历了经典控制、现代控制,取得了很多突破,但仍然无法满足复杂的任务需求。传感器的改进、智能控制的发展带来了新的可能,自主机动飞行和复杂系统的控制有望在这些方面取得突破[6]。本节将在目前国内外的研究基础上总结自主机动飞行架构、飞行控制理论的发展以及神经网络在其中的应用。
1.2.1 无人机机动飞行研究
近些年来,由于传感器精度、机载计算能力和控制算法的进步,无人机的自主机动飞行能力取得了一些进展,大多数研究单位使用小型无人机作为技术验证机。下面列举了部分单位的研究进展,并进行了简单的分析。这些研究机构的研究机型包含了固定翼、四旋翼、直升机等,实现方法也各有不同。
- 直升机:
斯坦福大学的吴恩达团队在2003年到2010年进行了一系列工作。其上层规划使用专业飞手示教得出标准的机动动作;使用强化学习、微分动态规划设计控制器,实现了无人直升机的原地翻转、原地滚、循环和飓风等机动动作的实物飞行[9, 11-13],如图1-5(c)所示。苏黎世联邦理工学院对直升机机动飞行做了很系统的工作,通过传统的模型辨识、导航层使用 控制,控制层使用增益调度控制,实现了悬停、筋斗、副翼横滚等多种机动动作[14]。
- 固定翼:
加拿大麦吉尔大学通过风洞精确建模、姿态控制(考虑力的模型)位置控制、推力控制;实现垂直悬停,刀刃特技仿真飞行,如图1-5(b)所示。韩国航空航天大学通过把重力加速度去掉,得出退化为失重环境下的模型;实现滚转通道解耦控制,实现了固定翼无人机的大滚转角机动飞行以及三维路径跟踪[15, 16]。南非斯特伦博斯大学通过模型预测控制实现了固定翼横滚、筋斗和英麦曼机动飞行[17-19]。南京航空航天大学在飞翼无人机机动飞行控制以及固定翼无人机栖落机动方面也做了持续的研究[20-22]。
- 四旋翼:
如图1-5(d)所示,苏黎世联邦理工学院Raffaello D’Andrea团队的对四旋翼的运动做了很多研究,其在2011年到2014年通过使用路径规划、开闭环控制结合和迭代学习等多种方法实现了四旋翼的空翻[10, 23, 24]。




这些研究得出,无人机的自主机动飞行可由不同的规划、控制以及建模方法实现,但整个控制系统的架构大致相同。
1.2.2 无人自主机动飞行架构
无人机机动飞行的实现一般分为两个环节:动作指令生成和机动飞行控制。动作指令生成主要是根据不同的机动动作要求产生欧拉角姿态+空速或者攻角侧滑角+空速的控制指令。机动飞行控制则根据控制指令和无人机当前的姿态、姿态角速度、速度等状态反馈,通过控制机构,例如发动机、矢量喷口、舵面等,实现姿态闭环控制。
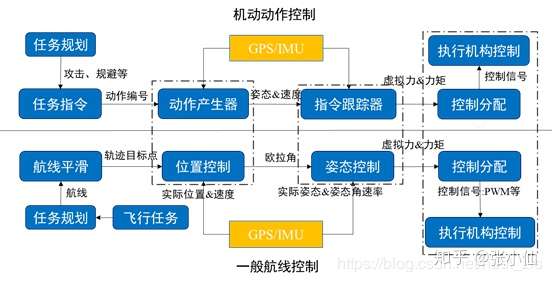
图1-6 机动动作控制与传统航线控制的对比
机动动作指令的产生方法和不同的机动动作相关,目前主要的产生方法包括经验公式法、数据滤波法、模型辨识法等。其中经验公式法采用根据机动飞行动作人工总结出的公式来产生,对于直观描述比较清晰的机动动作,可以给出比较规范的数学公式描述,根据对象无人机的动力学特性,可以确定动作的参数。数据滤波法常用于增强学习控制中,对于复杂的机动动作,直接从反复执行的数据中除去随机扰动项,得到平均的动作轨迹数据,作为动作的表示。模型辨识法也需要指定动作的表示模型,可以是描述过程的数学公式、神经网络、随机过程等,通过数据获得模型的参数,从而得到机动动作的表达。
不同于执行一般航线飞行的无人机,执行机动飞行的无人机一般采用机动动作库加上动作指令跟踪的方式进行飞行控制,其中控制器主要实现动作产生器给出的欧拉角姿态+速度或者攻角+侧滑角+空速的控制指令跟踪,实现从姿态到虚拟的力和力矩控制量的动态计算,然后再由控制分配环节转换为执行机构的控制量,实现飞机的6自由度控制。目前,控制器的设计方法一般都是非线性的,和无人机系统的建模紧密相关。
1.2.3 飞行控制理论的发展
传统飞行控制大多使用基于传递函数模型的经典频域或根轨迹法设计,包括典型的PID控制,通过建模、辨识、控制器设计、参数整定等步骤来完成控制器的实现与综合,其参数整定强烈依赖于经验,给飞机的试飞带来了很大的风险。
由于经典控制设计方法的缺陷,基于状态变量模型设计的现代控制理论方法,如最优控制技术在飞控系统的设计上得到一些发展。但随着飞行任务标准的提高,基于线性系统模型设计控制系统并不能保证飞机的大迎角飞行性能,因为这时飞机的气动力表现出强烈的非线性和非定常性,飞机运动强烈耦合,传统的小扰动线性化处理技术已无法适用,因而发展出了多种非线性控制律设计方法。其中有反馈线性化(微分几何方法和逆系统方法)、滑模变结构控制、非线性 优化、 综合鲁棒控制、反步控制等[25]。各种非线性控制的方法如表1-1所示:
无人机的机动性主要体现在空中飞行时速度、高度以及飞行方向的改变能力,改变的越快,机动性能就越好。对于无人机来说,可以突破人体生理极限,远远超过9g的过载,实现更剧烈的机动动作。大机动动作经常伴随着较大的迎角和侧滑角,飞机的气动力和动力学特性呈现出较强的非线性和耦合特性。在大机动,甚至超机动的情况下,空气动力学过程更加复杂,出现了气流分离、涡流形成、涡流破碎等复杂过程,无人机动力学特性出现非定常、分布式参数、无平衡工作点等特点,基于线性系统和稳定性设计的控制系统分析与设计方法很难适用。
值得一提的是,战斗机机动飞行控制中,利用动态逆研究有效控制的算法已经比较完善。然而,动态逆控制要求控制模型能精确建立,飞机状态是可精确测量或可估计的,这在实际中是很难实现的。本文将研究通过飞行器的动态逆控制,以及引入神经网络或干扰观测器来补偿逆误差,降低动态逆对模型的依赖,提高系统的鲁棒性能。
1.2.4 神经网络在飞行系统中的应用
近几十年来人工神经网络研究取得了突破性进展。所谓“人工神经网络”实际上是以一种简单计算、处理单元(即神经元)为节点,采用某种拓扑结构构成的网络,可以用来描述几乎任意的非线性系统。
神经网络模型种类繁多,但从其处理能力上讲,大致可以分为静态神经网络和动态神经网络两大类。静态神经网络只能用于处理文字识别、空间曲线的逼近等与时间无关问题,例如BP网络、RBF网络、样条函数网络、子波函数网络等。动态神经网络则可以处理与时间有关的对象,如时间序列建模和预测、动态系统辨识、语音识别等,典型的动态神经网络有Hopfield网络、ART网络、RNN、Elman网络、NARX神经网络。下面简单介绍一下神经网络在飞行系统中的应用:
(1)神经网络控制器
根据神经网络在控制器中的作用不同,神经网络控制器可分为两类:一类为神经控制,它是以神经网络为基础而形成的独立智能控制系统;另一类为混合神经网络控制,它是指利用神经网络学习和优化能力来改善传统控制的智能控制方法,如自适应神经网络控制等[33]。
补偿误差是神经网络在改善传统控制中的常见应用,如针对先进战机进行大迎角机动所体现出的强非线性、非定常、强耦合等特性,将动态逆方法与神经网络相结合,采用BP、RBF等神经网络对逆误差进行在线补偿[34]。
(2)拟合模型
a) 神经网络辨识
系统辨识是一个优化问题,精确的辨识模型可以用于控制器设计、控制系统预测和监控。近年来,对于线性、非时变的系统进行辨识已经取得了很大的进展。但是对于复杂的非线性系统的辨识问题,一直未能很好的解决,如具有高维时变性能的飞行控制系统的辨识。
文献[35]对传统的系统辨识方法作了总结,详细介绍了前馈网络与递归网络的结构、功能和算法以及在实际应用中设计神经网络需考虑的问题。然后利用递归网络对动态非线性系统进行辨识,并与传统的预报误差方法作了比较。结果表明,在无噪和有噪情况下,神经网络模型的辨识精度和泛化能力都要优于传统方法。
b) 策略和时序
神经网络具有较强的学习能力、记忆保留能力以及鲁棒性,可以根据当前的输入信息和历史信息做出合理的决策以及对时间序列进行拟合和预测。
(3)深度学习与控制
深度学习也即深层神经网络,鉴于其优越的性能,在图像识别、自然语言处理、机器人、生物信息处理等领域都有着广泛应用。具体在控制领域,相较于传统方法或者浅层网络,深度学习在控制目标识别、状态特征提取、系统参数辨识、控制策略[36]计算等方面都有着更加优越的表现。
综合以上四部分的调研,自主机动飞行有望在数据驱动、示教飞行、智能控制等方面取得新的突破。
1.3 本文的主要工作、贡献和结构
本文针对固定翼无人机自主机动飞行的实际需求,重点研究了无人机自主飞行系统的姿态控制、针对未建模因素等的补偿、机动动作的时序网络以及仿真验证。
主要工作和贡献如下:
(1)设计了一种新的基于神经网络和四元数的自适应动态逆姿态控制器,相比于传统动态逆控制器,该控制器解决了大机动动作下欧拉角的奇异问题设计。首先建立固定翼飞行器非线性模型,在此基础上实现了风轴系和体轴系下的动态逆控制,针对大机动动作下欧拉角的奇异问题提出了四元数动态逆的控制方案,针对飞行器建模误差、机动动作下干扰严重等问题设计了神经网络补偿。经过仿真验证,证明该控制器满足无人机机动动作下姿态实时跟踪的需求。
(2)首次将长短时记忆网络(LSTM)应用于无人机的机动动作实现,实现了具有抗干扰和记忆功能的机动指令生成器。针对机动动作难以准确描述和建模的问题,分别在实际飞行和仿真环境中进行了机动动作关键信息(姿态角、速度、GPS等)的数据采集,利用LSTM网络实现了机动动作姿态序列指令生成器。经过测试,该网络具备较好的记忆能力和抗干扰能力,能够满足机动指令的性能要求。
(3)搭建了一种高性能仿真训练系统,采集了大量仿真飞行数据,分别针对铅垂面、水平面以及复杂综合机动动作,设计了机动指令生成器,并在仿真环境下实现了基于数据驱动的无人机自主机动飞行。仿真结果表明,设计的系统架构可以实现固定翼无人机的机动飞行。
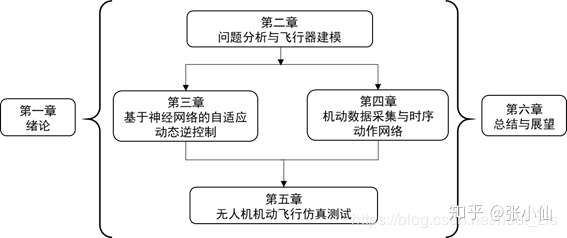
本文各章节安排如图1-7所示:
1 引言
机动飞行不同于常规飞行,在大迎角和侧滑角下,飞机的气动力和动力学特性呈现出较强的非线性和耦合特性,此时无人机的建模与控制都是一个难题,而建立飞行器的数学模型是进行飞行控制的前提条件。本章针对所面临的问题进行问题描述和目标分解,在此基础上建立了固定翼无人机非线性模型,并对所建立的模型进行了测试分析。
2.2 问题描述与目标分解
2.2.1 问题描述
本课题所基于的项目是“基于仿脑信息系统的无人机智慧控制”,目的是针对当前的无人作战需求,设计能完成高机动动作的无人机控制系统,需要在现有方法的基础上进行总结创新。
目前无人机一般采用任务规划、位置控制、姿态控制、控制分配、执行机构控制几个控制环路来实现运动控制。这种思路对于实现任务模式下的稳定控制比较有利,然而该方法在对抗条件下的机动飞行,以及大范围的飞行环境变化适应上仍存在不足。因此,对于机动飞行,需要在合适的系统框架下设计满足条件的控制律以及机动指令生成器。另一方面,传感器和试验技术的发展,促使无人机的设计、建模、飞行测试进入了数据驱动的时代。大量人工操作飞行的经验可以通过数据记录下来,数据驱动以及示教的方法应该能够在解决机动飞行和环境适应性问题上发挥更大的作用。
2.2.2 目标分解
针对上述问题,设计无人机自主机动飞行系统,主要工作安排如下:
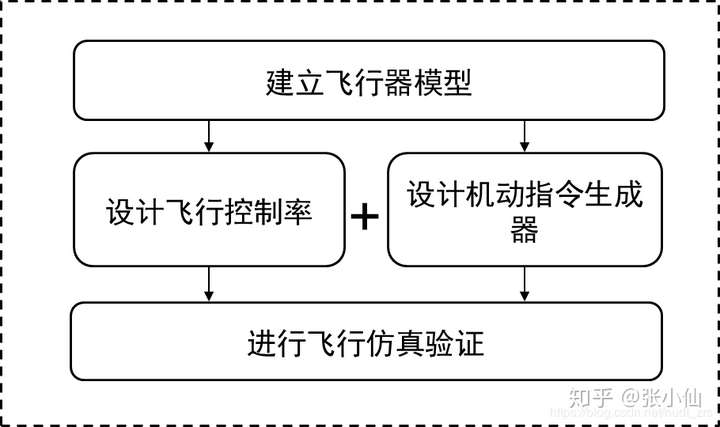 图2-1 工作流程图
图2-1 工作流程图
(1)建立飞行器模型
系统的数学模型是描述系统输入、输出以及内部变量关系的数学表达式,而模型的建立是控制器设计的前提,需要针对机动飞行的特点建立合理的固定翼无人机非线性模型。
(2)设计飞行控制律
飞行控制律的设计是机动飞行实现的关键环节,性能好的控制器可以实现对指令信号的准确跟踪。因此需要针对无人机传统控制方法高机动飞行能力差和大范围环境适应困难的问题,设计合适的控制律,实现无人机的机动飞行和典型情况下的控制,同时针对飞行器未建模因素、扰动等问题,进行不确定项的补偿。
(3)设计机动指令生成器
机动指令生成器的设计直接影响机动飞行的动作效果,因此需要选取机动动作,基于多样化的机载传感器,通过专业飞行操作手手动飞行高机动动作,采集无人机运动和控制输入数据,训练实时性强、稳定性好机动指令生成器。



图2-2 无人机机动示教飞行
(4)进行飞行仿真验证
飞行仿真验证是飞行算法走向实际应用的关键环节,因此需要搭建合理的飞行仿真系统,对设计的飞行控制律以及机动指令生成器进行验证。
本文转载自知乎
- 上一篇:没有啦!


